
西門子直流調速器,CPU 的工作模式
CPU 有以下三種工作模式:STOP 模式、STARTUP 模式和 RUN 模式。CPU 前面的狀態 LED 指示當前工作模式。
在 STOP 模式下,CPU 不執行程序。您可以下載項目。
在 STARTUP 模式下,執行一次啟動 OB(如果存在)。在啟動模式下,CPU 不會處理中斷事件。
在 RUN 模式,程序循環 OB 重復執行。可能發生中斷事件,并在 RUN 模式中的任意點執行相應的中斷事件 OB。可在 RUN 模式下下載項目的某些部分。
CPU 支持通過暖啟動進入 RUN 模式。暖啟動不包括儲存器復位。執行暖啟動時,CPU 會初始化所有的非保持性系統和用戶數據,并保留所有保持性用戶數據值。
存儲器復位將清除所有工作存儲器、保持性及非保持性存儲區、將裝載存儲器復制到工作存儲器并將輸出設置為組態的“對 CPU STOP 的響應”(Reaction to CPU STOP)。存儲器復位不會清除診斷緩沖區,也不會清除保存的 IP 地址值。
可組態 CPU 中“上電后啟動”(startup after POWER ON) 設置。該組態項出現在 CPU“設備組態”(Device Configuration) 的“啟動”(Startup) 下。通電后,CPU 將執行一系列上電診斷檢查和系統初始化操作。在系統初始化過程中,CPU 將所有非保持性位 (M) 存儲器,并將所有非保持性 DB 的內容復位為裝載存儲器的初始值。CPU 將保留保持性位 (M) 存儲器和保持性 DB 的內容,然后進入相應的工作模式。檢測到的某些錯誤會阻止 CPU 進入 RUN 模式。CPU 支持以下組態選項:
1.不重新啟動(保持為 STOP 模式)
暖啟動 - RUN 模式西門子6ES72315QD320XB0 西門子6ES72315QD320XB0暖啟動 - 斷電前的模式
可以使用編程軟件在線工具中的“STOP”或“RUN”命令更改當前工作模式。也可在程序中包含 STP 指令,以使 CPU 切換到 STOP 模式。這樣就可以根據程序邏輯停止程序的執行。
在 STOP 模式下,CPU 處理所有通信請求(如果適用)并執行自診斷。CPU 不執行用戶程序,過程映像也不會自動更新。
2.啟動過程
只要工作模式從 STOP 切換到 RUN,CPU 就會清除過程映像輸入、初始化過程映像輸出并處理啟動 OB。通過“啟動 OB”中的指令對過程映像輸入進行任何的讀訪問,都只會讀取零值,而不是讀取當前物理輸入值。因此,要在啟動模式下讀取物理輸入的當前狀態,必須執行立即讀取操作。接著再執行啟動 OB 以及任何相關的 FC 和 FB。如果存在多個啟動 OB,則按照 OB 編號依次執行各啟動 OB,OB 編號小的先執行。
每個啟動 OB 都包含幫助您確定保持性數據和時鐘有效性的啟動信息。可以在啟動 OB 中編寫指令,以檢查這些啟動值,從而采取適當的措施
在啟動過程中,CPU 還會執行以下任務:
1.在啟動階段,對中斷進行排隊但不加以處理
2.在啟動階段,不執行任何循環時間監視
3.在啟動模式下,可以更改 HSC(High-Speed Counter,高速計數器)、PWM(Pulse-bbbbb Modulation,脈沖寬度調制)以及 PtP(Point-to-Point communication,點對點通信)模塊的組態
4.只有在 RUN 模式下才會真正運行 HSC、PWM 和點對點通信模塊
5.執行完啟動 OB 后,CPU 將進入 RUN 模式并在連續的掃描周期內處理控制任務。
緊湊型 CPU 1214C 具有:
1. 3 種設備類型,帶有不同的電源和控制電壓
2. 集成的電源,可作為寬范圍交流或直流電源(85 至 264 V 交流或 24 V 直流)
3. 集成的 24 V 編碼器/負載電流源:
用于直接連接傳感器和編碼器。400 mA 的輸出電流也可用作負載電源
4. 14 點集成 24 V 直流數字量輸入(漏電流/源電流(IEC 1 型漏電流))
5. 10 點集成數字量輸出,24 V 直流或繼電器
6. 2 點集成模擬量輸入,0 至 10 V
7. 2 點脈沖輸出 (PTO),頻率高達 100 kHz
8. 脈沖寬度調制輸出 (PWM),頻率高達 100 kHz
9. 集成以太網接口(TCP/IP native、ISO-on-TCP)
10. 6 個快速計數器(3 個頻率為 100 kHz;3 個頻率為 30 kHz),帶有可參數化的使能和復位輸入,可以同時用作帶有 11.2 點單輸入的加減計數器,或用于連接增量型編碼器
12. 通過附加通訊接口擴展,例如,RS485 或 RS232
13. 通過信號板使用模擬或數字信號直接在 CPU 上擴展(保持 CPU 安裝尺寸)
電源(PS)
電源模塊提供了機架和CPU內部的供電電源,置于1號機架的位置。
(2)處理器(CPU)
CPU存儲并處理用戶程序,為模塊分配參數,通過嵌入的MPI總線處理編程設備和PC、模塊、其它站點之間的通訊,并可以為進行DP主站或從站操作裝配一個集成的DP接口。置于2號機架。
(3)接口模塊(IM)
接口模塊將各個機架連接在一起。不同型號的接口模塊可支持機架擴展或PROFIBUS DP連接。置于3號機架,沒有接口模塊時,機架位置為空。
(4)信號模塊(SM)
通常稱為I/O(輸入/輸出)模塊。測量輸入信號并控制輸出設備。信號模塊可用于數字信號和模擬信號,還可用于進行連接,如傳感器和啟動器的連接。
(5)功能模塊(FM)
用于進行復雜的、重要的但立于CPU的過程,如:計算、位置控制和閉環控制。
(6)通訊處理器(CP)
模塊化的通訊處理器通過連接各個SIMATIC站點,如:工業以太網,PROFIBUS或串行的點對點連接等。
后三個模塊在機架上可以任意放置,系統可以自動分配模塊的地址。
需要說明的是,每個機架只能安裝8個信號模塊、功能模塊或通訊模塊。如果系統任務超過了8個,則可以擴展機架(每個帶CPU的機架可以擴展3個機架)。
各個模塊的性能具體如下:
(1)電源模塊(PS)
電源模塊用于將SIMATIC S7-300 連接到120/230V AC電源。
(2)CPU模塊
各種CPU 有各種不同的性能,例如,有的CPU 上集成有輸入/輸出點,有的CPU上集成有PROFI- BUS-DP通訊接口等。
以上只是列出了部分指標,設計時還要參看相應的手冊。
(3)西門子直流調速器接口模塊
接口模塊用于多機架配置時連接主機架(CR)和擴展機架 (ER)。S7-300通過分布式的主機架(CR)和3個擴展機架(ER),可以操作多達32個模塊。運行時無需風扇。
(4)信號模塊
信號模塊用于數字量和模擬量輸入/輸出,又分DI/DO(數字量輸入/輸出)和AI/AO(模擬量輸入/輸出)模塊。
1.數字量輸入模塊:
2.數字量輸出模塊:
3.數字輸入/輸出模塊:
4.繼電器輸出模塊:
5.模擬量輸入模塊
6.模擬量輸出模塊:
7.模擬量輸入/輸出模塊:
(5)功能模塊
西門子S7-300功能模塊模塊適用于各種場合,功能塊的所有參數STEP7中分配,操作方便,而且不必編程。包括:計數器模塊(FM350),定位模塊(FM351),凸輪控制模塊(FM352),閉環控制模塊(FM355)等許多用于特定場合的模塊。
(6)通訊模塊(CP)
S7-300通訊模塊是用于連接網絡和點對點通訊用的模塊,比如:用于S7-300和SIMATIC C7通過PROFIBUS通訊的模塊CP343-5,用于S7-300和工業以訊的模塊CP343-1及CP343-1 IT等
確保強弱電沒有混合到一起因為PLC電源為v,一旦因為接線錯誤V接進PLC里,很容易將PLC或者拓展模塊燒毀。二檢查PLC外部回路,也就是俗稱的“打點”電源確認完畢后送電,輸入輸出點,這就是俗稱的“打點”,IO點需要挨個,包括操作按鈕,急停按鈕,操作指示燈以及氣缸及其限位開關等等,具體方法是一人在現場側操作按鈕等,另一人在PLC測輸入輸出信號;對于大型系統應該建立表,即后做好標記。
禁止循環中斷的事件會影響所有的優先級。此處可以參見這兩個SFC的在線幫助。循環中斷檢查是否在循環程序中使用SFC“DIS_AIRT”了不希望出現的循環中斷或者中斷驅動的程序,結果造成這些中斷或者程序丟失。使用SFC“DIS_AIRT”,可以處理優先級高于當前OB的循環中斷OB。可以在OB中多次調用SFC。操作系統會計算調用SFC的,處理一直有效,除非使用SFC“EN_AIRT”取消使用SFC設置的中斷,或者直到處理完當前OB為止。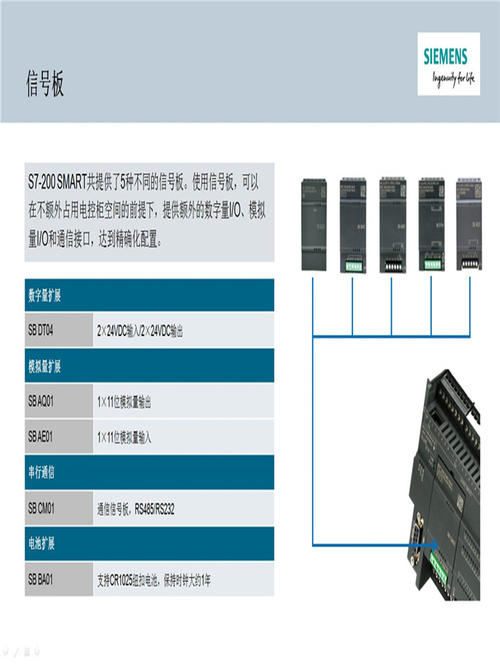
S7 1200 的USS庫
USS_DRV 功能塊是S7-1200 USS通信的主體功能塊,接受變頻器的信息和控制變頻器的指令都是通過這個功能快來完成的。必須在主 OB中調用,不能在循環中斷OB中調用。
USS_PORT功能塊是S7-1200與變頻器USS通信的接口,主要設置通信的接口參數。可在主OB或中斷OB中調用。
USS_RPM功能塊是通過USS通信讀取變頻器的參數。必須在主 OB中調用,不能在循環中斷OB中調用。
USS_WPM功能塊是通過USS通信設置變頻器的參數。必須在主 OB中調用,不能在循環中斷OB中調用。
這些功能塊與變頻器之間的控制關系如下圖所示:
USS 通信功能塊與變頻器的控制關系
USS_DRV功能塊通過USS_DRV_DB數據塊實現與USS_PORT功能塊的數據接收與傳送,而USS_PORT功能塊是S7-1200 PLC CM1241 RS485模塊與變頻器之間的通信接口。USS_RPM功能塊和USS_WPM功能塊與變頻器的通信與USS_DRV功能塊的通信方式是相同的。
每個S7-1200 CPU多可帶3個通信模塊,而每個CM1241 RS485通信模塊多支持16個變頻器。因此用戶在一個S7-1200 CPU中多可建立3個USS網絡,而每個USS網絡多支持16個變頻器,總共多支持48個USS變頻器。
5. 2 S7 1200 PLC進行USS通信的編程
1.USS通信接口參數功能塊的編程
USS通信接口參數功能塊的編程如下圖所示。
USS通信接口參數功能塊的編程
USS_PORT功能塊用來處理USS網絡上的通信,它是S71200 CPU與變頻器的通信借口。每個CM1241 RS485模塊有且必須有一個USS_PORT功能塊。
PORT:指的是通過個通信模塊進行USS通信。
BAUD:指的是和變頻器進行通行的速率。 變頻器的參數P2010種進行設置。
USS_DB:指的是和變頻器通信時的USS數據塊。每個通信模塊多可以有16個USS數據塊,每個CPU多可以有48個USS數據塊,具體的通信情況要和現場實際情況相聯系。每個變頻器與S7-1200進行通信的數據塊是的。
ERROR:輸出錯誤。
STATUS:掃描或初始化的狀態。
S7-1200 PLC與變頻器的通信是與它本身的掃描周期不同步的,在完成一次與變頻器的通信事件之前,S7-1200通常完成了多個掃描。
USS_PORT通信的時間間隔是S7-1200與變頻器通信所需要的時間,不同的通信波特率對應的不同的USS_PORT通信間隔時間。下圖列出了不同的波特率對應的USS_PORT小通信間隔時間。
不同的波特率對應的USS_PORT小通信間隔時間
USS_PORT在發生通信錯誤時,通常進行3次嘗試來完成通信事件,那么S7-1200與變頻器通信的時間就是USS_PORT發生通信超時的時間間隔。例如:如果通信波特率是57600,那么USS_PORT與變頻器通信的時間間隔應當大于小的調用時間間隔,即大于36.1Ms而小于109Ms。S7-1200 USS 協議庫默認的通信錯誤超時嘗試次數是2次。
基于以上的USS_PORT通信時間的處理,我們建議在循環中斷OB塊中調用USS_PORT通信功能塊。在建立循環中斷OB塊時,我們可以設置循環中斷OB塊的掃描時間,以滿足通信的要求。
5. 3 S7 1200 PLC進行USS通信的調試
S7-1200 PLC 通過CM1241 RS485模塊與變頻器進行USS通信時,需要注意如下幾點:
當同一個CM1241 RS485 模塊帶有多個(多16個)USS變頻器時,這個時候通信的USS_DB是同一個,USS_DRV功能塊調用多次,每個USS_DRV功能塊調用時,相對應的USS站地址與實際的變頻器要一致,而其它的控制參數也要一致。
當同一個S7-1200 PLC 帶有多個CM1241 RS485模塊(多3個)時,這個時候通信的USS_DB相對應的是3個,每個CM1241 RS485模塊的USS網絡使用相同的USS_DB,不同的USS網絡使用不同的USS_DB。
當對變頻器的參數進行讀寫操作時,注意不能同時進行USS_RPM和USS_WPM的操作,并且同一時間只能進行一個參數的讀或者寫操作,而不能進行多個參數的讀或者寫操作。
PS:對于西門子SITOP為什么會有PLC供電電源,可以從三個維度來總結。
① 外觀匹配PLC;
② 電氣性能上,的SIMATIC電源匹配PLC工作電壓上限28.8V;
③ 優異的電磁兼容性,EMC紋波。
2)非西門子PLC:
系統電源:第三方電源/SITOPModular/Smart/Lite
電源: SITOP Modualr/Smart/Lite/PM207
3)專機、單片機、工控機:
系統和電源: SITOP Modualr/Smart/Lite/PM207
無論是哪種情況,SITOP電源無處不在,只是西門子PLC供電電源的選擇是毋庸置疑的。
三、從系統的可擴展性和兼容性的方面來說
市場上控制類產品繁多,無論DCS還是PLC,均有很多廠商在生產和銷售。對于PLC系統來說,一般沒有或很少有擴展的需求,因為PLC系統一般針對于設備來使用。一般來講,PLC也很少有兼容性的要求,比如兩個或以上的系統要求資源共享,對PLC來講也是很困難的事。而且PLC一般都采用的網絡結構,比如西門子的MPI總線性網絡,甚至增加一臺操作員站都不容易或成本很高。
DCS在發展的過程中也是各廠家自成體系,但大部分的DCS系統,比如西門子、ABB、霍尼維爾、GE、施耐德等等,雖說系統內部(過程級)的通訊協議不盡相同,但操作級的網絡平臺不約而同的選擇了以太網絡,采用標準或變形的TCP/IP協議。這樣就提供了很方便的可擴展能力。在這種網絡中,控制器、計算機均作為一個節點存在,只要網絡到達的地方,就可以隨意增減節點數量和布置節點位置。另外,基于windows系統的OPC、DDE等開放協議,各系統也可很方便的通訊,以實現資源共享。
四、從數據庫來說
DCS一般都提供統一的數據庫。換句話說,在DCS系統中一旦一個數據存在于數據庫中,就可在任何情況下引用,比如在組態軟件中,在軟件中,在趨勢圖中,在報表中……而PLC系統的數據庫通常都不是統一的,組態軟件和軟件甚至歸檔軟件都有自己的數據庫。為什么常說西門子的S7 400要到了414以上才稱為DCS?因為西門子的PCS7系統才使用統一的數據庫,而PCS7要求控制器起碼到S7 414-3以上的型號。
五、從時間調度上來說
PLC的程序一般不能按事先設定的循環周期運行。PLC程序是從頭到尾執行一次后又從頭開始執行。(現在一些新型PLC有所改進,不過對任務周期的數量還是有限制)而DCS可以設定任務周期。
六、從應用對象的規模上來說
西門子CPU1211C參數介紹PLC一般應用在小型自控場所,比如設備的控制或少量的模擬量的控制及聯鎖,而大型的應用一般都是DCS。當然,這個概念不太準確,但很直觀,習慣上我們把大于600點的系統稱為DCS,小于這個規模叫做PLC。我們的熱泵及QCS、橫向產品配套的控制系統一般就是稱為PLC。
以上是簡單概括了兩者的區別之處。嚴格的說,PLC與DCS現在已經不能*一刀切開了,兩者關系已經很模糊的說。
博途TIA的配置
在博途軟件中新建項目,本案選取西門子S7-300PLC,其型號為CPU 313C-2DP,該PLC 為集成式的PLC,自帶PROFIBUS-DP口,可以作為主站也可以作為從站,在本案中,PLC作為主站。
S7-200 SMART CPU能否支持5 V編碼器?
ST20、ST30 CPU的I0.0~I0.3,I0.6~I0.7,ST40、ST60 CPU的I0.0~I0.3可以支持。
5.S7-200 SMART CPU能否連接差分輸出的編碼器?
不能。由于查分數出的信號需要的差分信號件,而S7-200 SMART CPU不具備這樣的差分接口,所以無法直接連接差分輸出的編碼器。
6.為什么高速計數器不能正常工作?
在程序中要使用初次掃描存儲器位SM0.1來調用HDEF指令,而且只能調用一次。如果用SM0.0調用或者第二次執行HDEF指令會引起運行錯誤,而且不能改變一次執行HDEF 指令時對計數器的設定。
7.對高速計數器如何尋址? 為什么從SMDx中讀不出當前的計數值?
可以直接用HC0;HC1;HC2;HC3;HC4;HC5對不同的高速計數器進行尋址讀取當前值,也可以在狀態表中輸入上述地址直接監視高速計數器的當前值。SMDx不存儲當前值,參見上述表2。
高速計數器的計數值是一個32位的有符號整數。
8.高速計數器如何復位到0?
選用帶外部復位模式的高速計數器,當外部復位輸入點信號有效時,高速計數器復位為0
也可使用內部程序復位,即將高速計數器設定為可更新初始值,并將初始值設為0,執行HSC指令后,高數計數器即復位為0
9.高速計數器的值在復位后是復位到初始值還是“0”值?
外部復位會將當前值復位到0值而不是初始值;內部復位則將當前值復位到初始值(若初始值設為”0“,則內部復位也是復位到”0“值)。如果你設定了可更新初始值,但在中斷中未給初始值寄存器賦新值,則在執行HSC 指令后,它將按初始化時設定的初始值賦值。
10.為何給高速計數器賦初始值和預置值時后不起作用,或效果出乎意料?
高速計數器可以在初始化或者運行中更改設置,如初始值、預置值。其操作步驟應當是:
設置控制字節的更新選項。需要更新哪個設置數據,就把控制字節中相應的控制位置位(設置為“1”);不需要改變的設置,相應的控制位就不能設置
然后將所需 的值送入初始值和預置值控制寄存器
西門子PLC 移位指令及應用:可使用移位指令向左或向右逐位移動輸入 IN 的內容(另請參閱 CPU 寄存器)。向左移動 n 位相當于將輸入端 IN 的內容乘以 2 的 n 次冪(2 n);向右移動 n 位則相當于將輸入端 IN 的內容除以 2 的 n 次冪(2n)。例如,如果將等價于十進制值 3 的二進制數左移 3 位,將得到等價于十進制值 24 的二進制數。
西門子變頻器
詳細使用及方法介紹說明如果將等價于十進制值 16 的二進制數右移 2 位,則會得到等價于十進制值 4 的二進制數。可提供給輸入參數 N 的數值決定了移動相應值的位數。移位指令產生的空位將用零或符號位的信號狀態(0 表示正,1 表示負)來填補。*移動的位的信號狀態將裝入狀態字的 CC1 位中。狀態字的 CC0 和 OV 位將復位為 0。您可以使用跳轉指令判斷 CC1 位。
西門子PLC 移位指令根據不同參數調整以及數據類型,可用于SHR_I(整數右移)、SHR_DI(長整數右移)、SHL_W(字左移)、SHR_W(字右移)、SHL_DW(雙字左移)以及SHR_DW(雙字右移)。
屬性
數字量輸入模塊 SM 321; DI 8 x AC 120/230 V ISOL 的屬性:
CPU1212C授權代理西門子1200plcPLC模塊目前,SIMATIC PLC 正在執行越來越多的功能,原本需要*不同技術。 對您來說,一切都變得更加容易,更加一致,更加經濟
基本型控制器
基本型控制器是適合中低端應用的智能控制器。包括標準型和安全型。通過其集成輸入和輸出以及工藝功能,可實現高性價比的緊湊解決方案。使用基本型控制器,可通過集成和可選通信接口,實現聯網簡便的靈活解決方案。
基本型控制器可在 TIA 博途平臺中進行組態和編程。工程組態效率高,而且,隨著應用復雜性的增加,還可方便地轉為使用型控制器。
 點擊交流
點擊交流